Our Concept: A New Approach to Sustainable Deep Sea Mining
Who We Are:
At Noble Deep, we draw inspiration from Alfred Nobel’s legacy of boldness — especially in transformative innovation. Our mission is to revolutionize how humanity harvests critical resources from the deep seabed. We aim to create a sustainable, environmentally responsible approach to mineral extraction that meets both present needs and future stewardship.
While the challenges are immense, history shows that with ingenuity and persistence, these obstacles can be overcome.
Vision:
Within the next year, Noble Deep aims to develop its first proof-of-concept prototype — a system designed to demonstrate the technical feasibility of our unique approach.
This initial prototype will also serve as the foundation for environmental studies. If early testing reveals any areas of concern, we will continue research and development until our methods meet both technical performance and ecological responsibility.
The Current Problem:
Deep-sea mining is rapidly approaching reality, as global demand for critical minerals continues to grow. However, current extraction methods pose severe ecological risks.
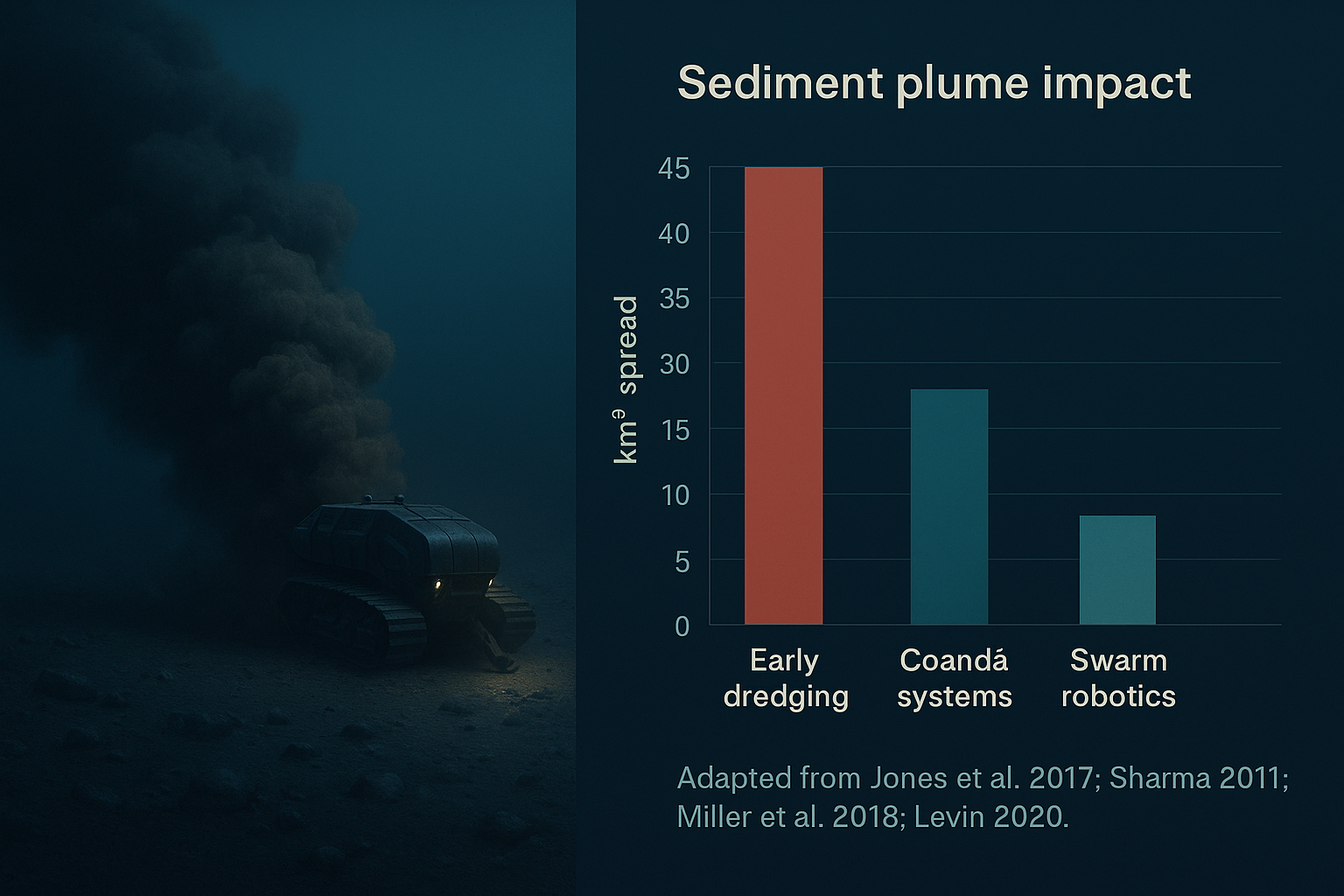
Most conventional techniques rely on track-based locomotion systems and Coandă-effect collection methods. While these are improvements over early trials, they still generate sediment plume clouds — disturbances that can smother benthic and marine life, alter water chemistry, and impact fragile ecosystems across vast distances.
Worse, much of this activity is expected to take place on the abyssal plain — one of Earth’s least studied and least understood ecosystems. Without a better approach, humanity risks inflicting irreversible damage before fully understanding the consequences.

Our Approach: Swarm Robotics:
Rather than relying on a single massive dredging system — prone to mechanical failures and difficult to scale — Noble Deep proposes an alternative: thousands of small, intelligent underwater robots working together.
This model offers several key advantages:
Inspired by Nature: Like flocks of birds, swarm systems operate without centralized control. Each autonomous underwater vehicle (AUV) makes decisions based on local information, enabling the swarm to self-organize and adapt in real time.
Decentralized Resilience: Hundreds to thousands of AUVs can harvest nodules in parallel. If one unit fails, the rest continue — unlike centralized dredging systems, where a single breakdown can halt operations.
Adaptive Intelligence: Advances in AI and machine learning allow AUVs to improve over time, dynamically adapting to new environments and obstacles.
Reduced Environmental Impact: By replacing dredging with distributed, surgical collection, seabed disturbance and plume generation can be significantly minimized.
Swarm robotics presents a powerful new avenue for addressing the central challenge of deep-sea mining: how to access critical resources without causing irreversible harm. Technically, it offers greater scalability, flexibility, and reliability, while also enabling broader collection with far less risk of catastrophic downtime.
What now?:
We’re currently in the planning and design phase for our first generation of AUVs. In the coming months, we aim to begin development on a proof-of-concept system.
As we progress we’ll continue to share updates, research findings, and anything we learned along the way.
If you're a scientist, engineer, policymaker, investor, or environmental advocate — we invite you to join us in shaping the future of responsible ocean resource development.
Disclaimer: All images in this article are AI-generated conceptual renderings and may not represent final designs. Data visualizations are adapted from published sources where cited.